5. Die
Eichung
5.1
Problematik, Lösungsweg
Die gesamte Problematik der Eichung liegt darin, der durch die TF-MB gemessenen
relativen Widerstandsänderung der Sonde –und nur der Sonde-
eine genaue definierte Geschwindigkeit zuzuordnen. Man kann zwar versuchen,
so genau es eben geht, eine definierte Geschwindigkeit herzustellen, allerdings
nur bis zu einer bestimmten Fehlertoleranz. Jedoch nutzen wir mit dieser
Kenntnis nicht die volle und wesentlich präzisere Möglichkeit
der Geschwindigkeitsmessung durch die Δ/R/R-Bestimmung. Wenn wir
unsere Messsonde in die Rohrmitte bringen, dann wird dadurch einem bekannten
v eine von der TF-MB angezeigte relative Widerstandsänderung zugeordnet,
und wir verfügen über eine erste Beziehung zwischen v und ΔR/R
mit der Genauigkeit der vorherbestimmten Geschwindigkeit. Die Geschwindigkeit
entnehmen wir den Rota-Datenblättern. Hier sind sie mit einer uns
bekannten Genauigkeit in einer Tabellenform festgehalten. Werden Zwischenwerte
benötigt, wird interpoliert; natürlich mit einem gewissen Fehler.
Würde man jetzt versuchen, diese Werte untereinander auszugleichen,
indem man mittelt, kann es passieren, dass man sich von dem den Werten
entspringenden Bezugssystem entfernt. Wir benötigen daher ein uns
bekanntes Bezugssystem. Vorgeschlagen wird, die Rotameterskalen als Bezugssystem
zu verwenden. Die Funktion zwischen Rotameterskala und Geschwindigkeit
ist uns näherungsweise bekannt. Siehe Diagramm 5. Sie ist in erster
Näherung linear.
Ich bin nun folgendermaßen vorgegangen:
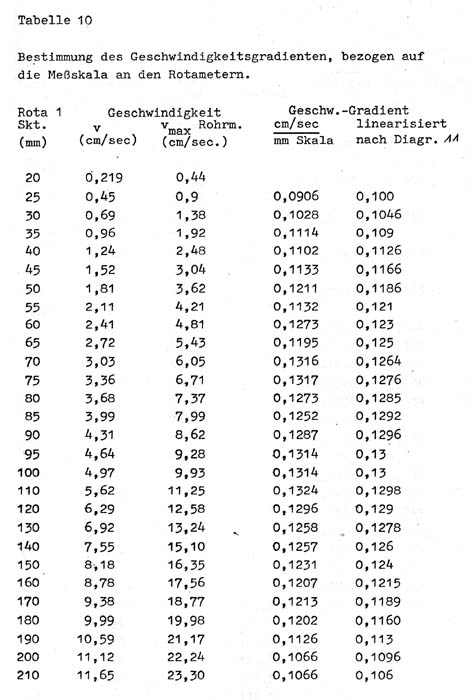
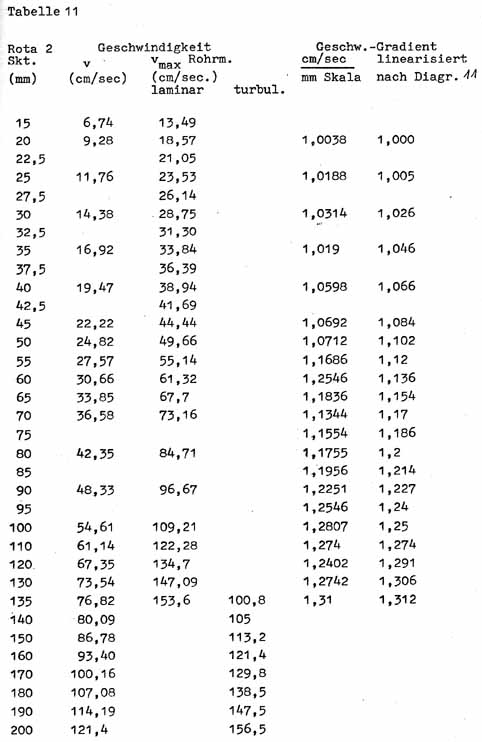
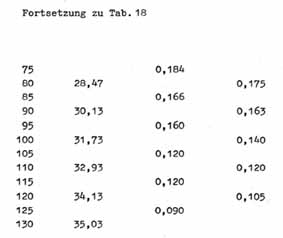
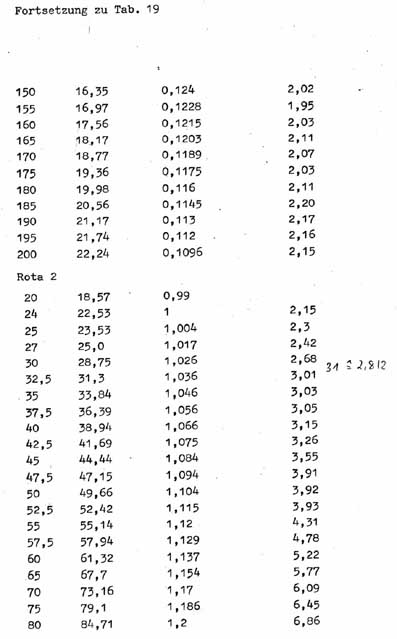
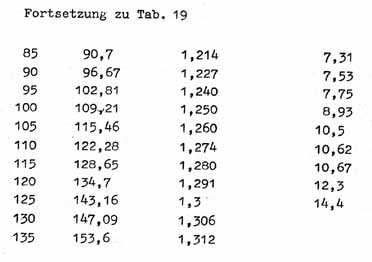
Zuerst habe ich mir für eine große Anzahl dicht zusammenliegender
Rota-Skalenwerte die dazugehörigen Geschwindigkeiten aus Tab. 4 bzw.
5 herausgeholt, diese möglichst genau berechnet und (mit Interpolationsfehler)
zugeordnet.
Siehe Tabelle 10 und 11.
Diese Geschwindigkeit ist hier gleichzeitig auch in vmax ausgedrückt.
Zwischen benacharten Werten wurde nun die Differenz gebildet und auf den
jeweiligen Skalenwert (Einheit mm) bezogen. Dies wurde nochmals durchgeführt.
Dadurch hatte ich einen sogenannten Geschwindigkeitsgradient. Dieser müsste,
wenn er fehlerfrei wäre, genau der Funktion der Rotameter folgen.
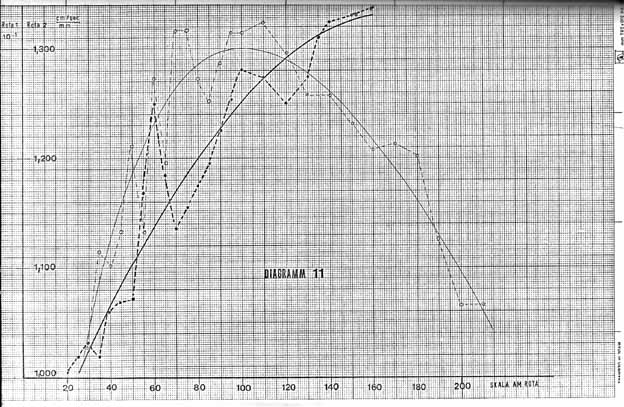
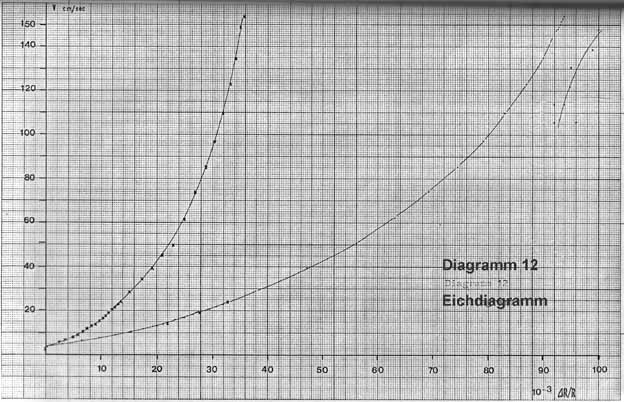
Dies tat er nicht, was schon zu erkennen war. Daher wurde dieser Geschwindigkeitsgradient
in Diagramm 11 gegen die Rotameteranzeige aufgetragen und dadurch versucht,
die Funktion herauszufinden. Es ist ja nicht einleuchtend, warum die Steigung
der Geschwindigkeit im Rotameter „Sprünge“ macht. Sie
musste also einer estimmten konstruktiven physikalischen Funktion folgen.
Diese Funktion wurde durch Mittelung gefunden und die neuen linearisierten
Geschwindigkeitsgradienten notiert. Diese waren nun annähernd fehlerfrei
und auf feste Werte (Skalenteile am Rotameter) bezogen.
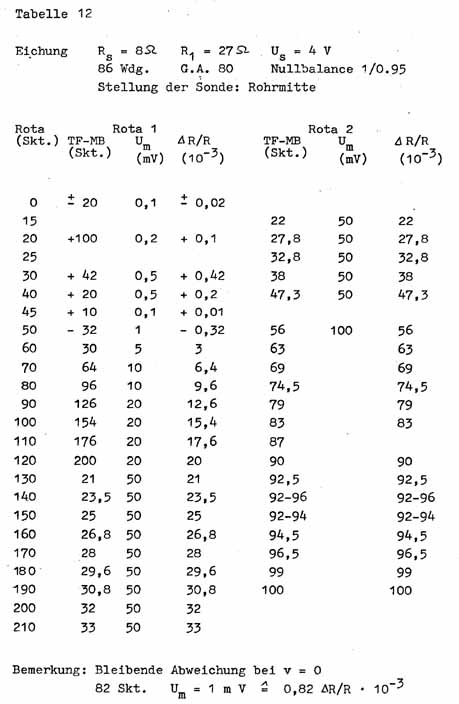
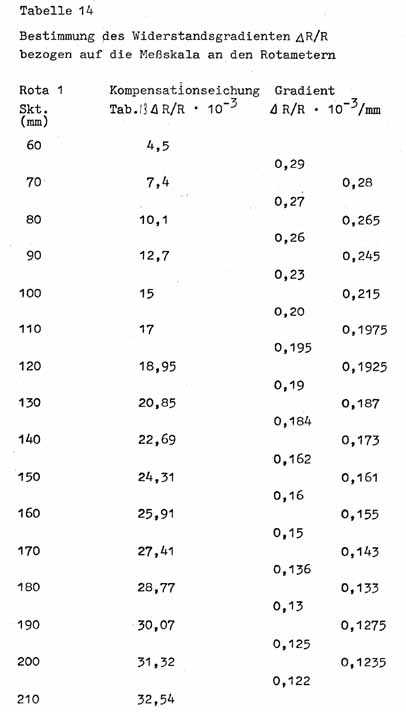
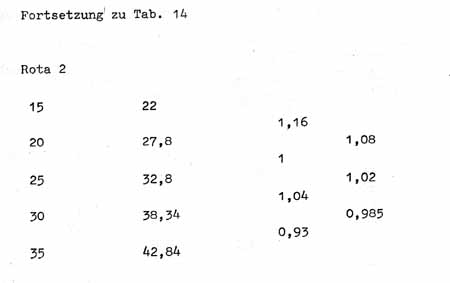
Der Gedanke war nun folgender:
Die Widerstandsänderung Δ R/R, welche ja auch in Abhängigkeit
von der Rotameteranzeige afgenommen wurde, ähnlich genau zu bestimmen,
d. h. eng zusammenliegende Werte, welche genaunach dem Kompensationsverfahren
ausgemessen werden können, untereinander zu linearisieren und auf
das feste Bezugssystem Rotameteranzeige zu legen. So konnte nun über
dieses Bezugssystem Geschwindigkeit - Δ R/R genau bestimmt werden.
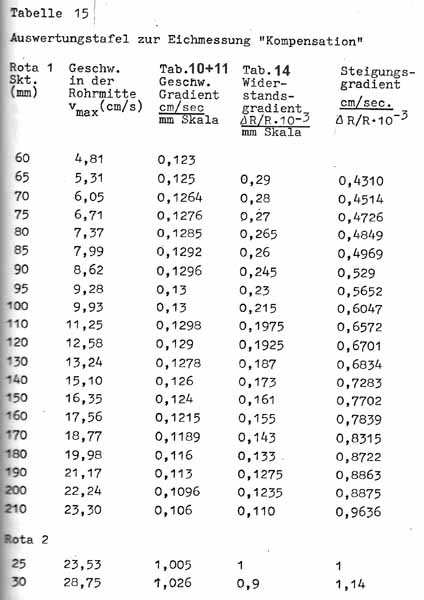
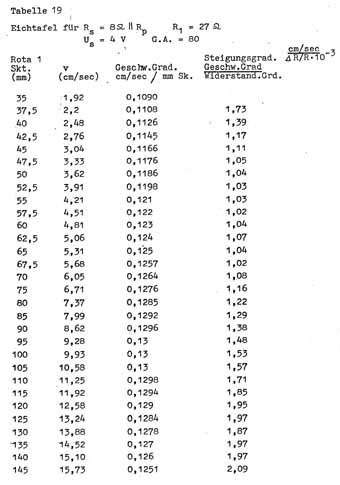
Dementsprechend entstanden meine Eichtafeln.
Anhand dieser Eichtafeln kann ich nun sehr präzise einer Δ R/R-Änderung
eine Geschwindigkeitsänderung zuordnen. In der Praxis kommt es ja
fast ausschließlich darauf an, Geschwindigkeitsänderungen definiert
zu erfassen. Ich bewege mich nun aufgrund meiner Eichtafeln auf der Funktion
Geschwindigkeit zu Δ R/R und bin vom Nullpunkt losgelöst,
so dass eine Veränderung des Nullpunks nur eine sehr geringe Steigungsveränderung
mit sich bringt.
In der Praxis sieht das folgendermaßen aus:
Einer bestimmten Geschwindigkeit ordne ich nun anhand der Rotameteranzeige
oder der Grundeichung eine Geschwindigkeit zu, gering fehlerbehaftet,
aber ab jetzt stelle ich Änderungen sehr präzise fest. Damit
ich optimal messe, muß ich der Geschwindigkeit mit meinem Gradienten
folgen.
Anhang der abschließenden Probemessung mit einem Gitter wird den
Eichtafeln Präzision bescheinigt, da ich hier Geschwindigkeitsverteilung
und –änderung mit einer Genauigkeit von wenigen Zehntel mm/sec.,
bezogen auf 30 cm/sec., feststellen kann (0,1%).
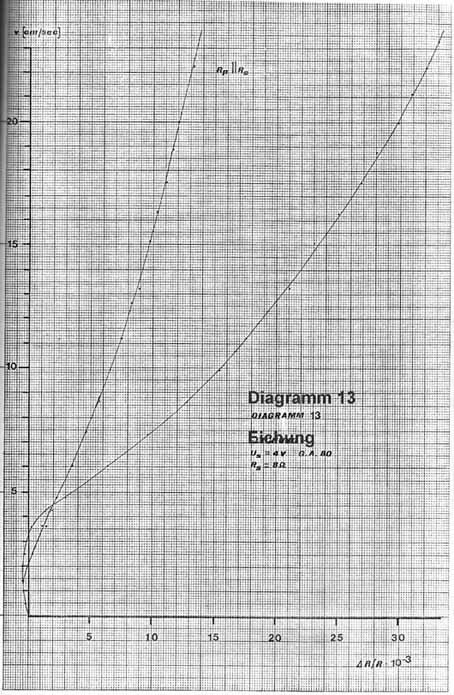
5.2
Sondeneichung
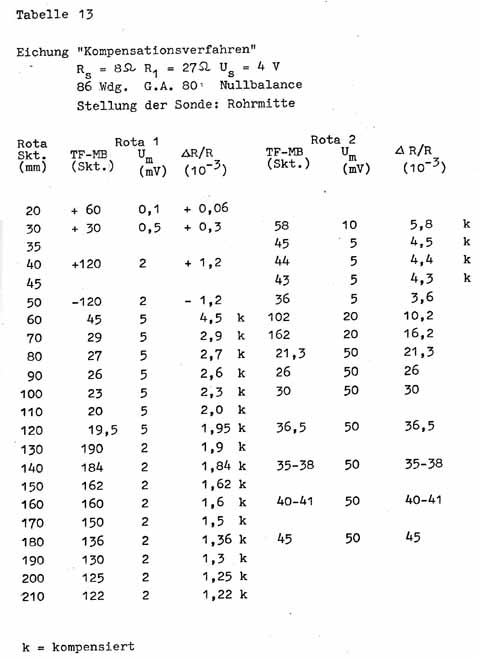
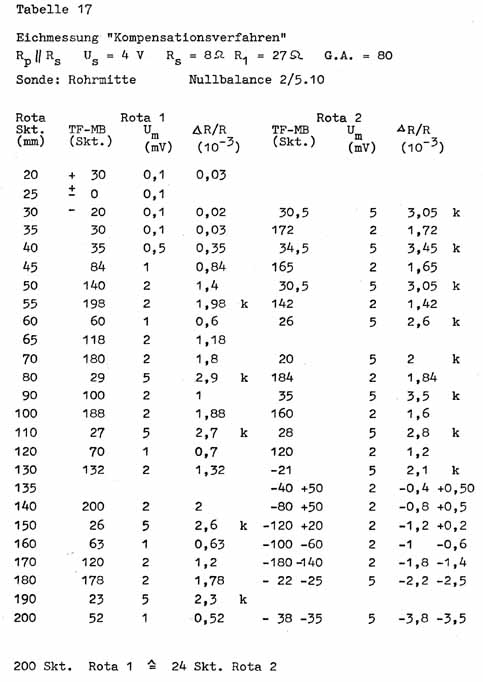
Die Eichung der Widerstandssonde erfolgte zweimal. Zuerst als Gesamteichung,
dann im Kompensationsverfahren. Zugleich wurde die Empfindlichkeit der
Sonde durch Zuschalten eines Rp verringert und dadurch auch noch stabiler.
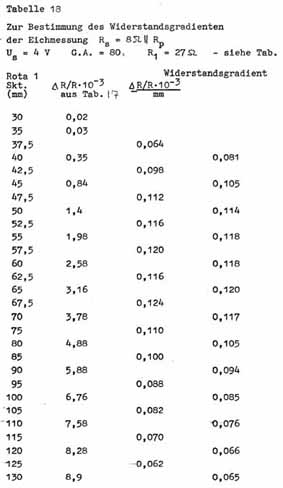
Für „beide“ Widerstandssonden wurde nun nach dem unter
5.1. beschriebenen Verfahren der Widerstandsgradient bestimmt. Anschließend
ist der Steigungsgradient in den Auswertungstafeln enthalten.
Im folgenden wurde ausschließlich mit der Sonde –welcher der
Rp zugeschaltet war- gemessen. Rs //Rp
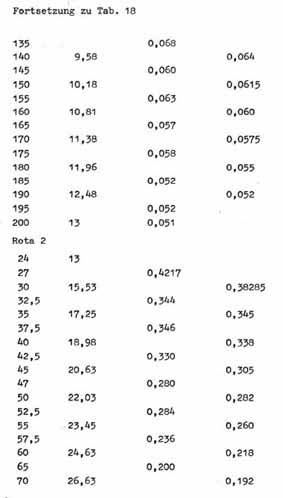
Muss der wird eine neue Sonde gebaut, so muss sie nach dem Kompensationsverfahren
genau ausgemessen werden und der Widerstandsgradient gebildet werden.
Dieses bezieht man auf den in Tab. 10 bzw. 11 enthaltenen Geschwindigkeitsgradienten
und erhält so den neuen Steigungsgradient, mit welchem sofort wieder
Messungen ausgewertet werden können.
|